I am a researcher at META FAIR, where I develop Foundational Models for Robotics.
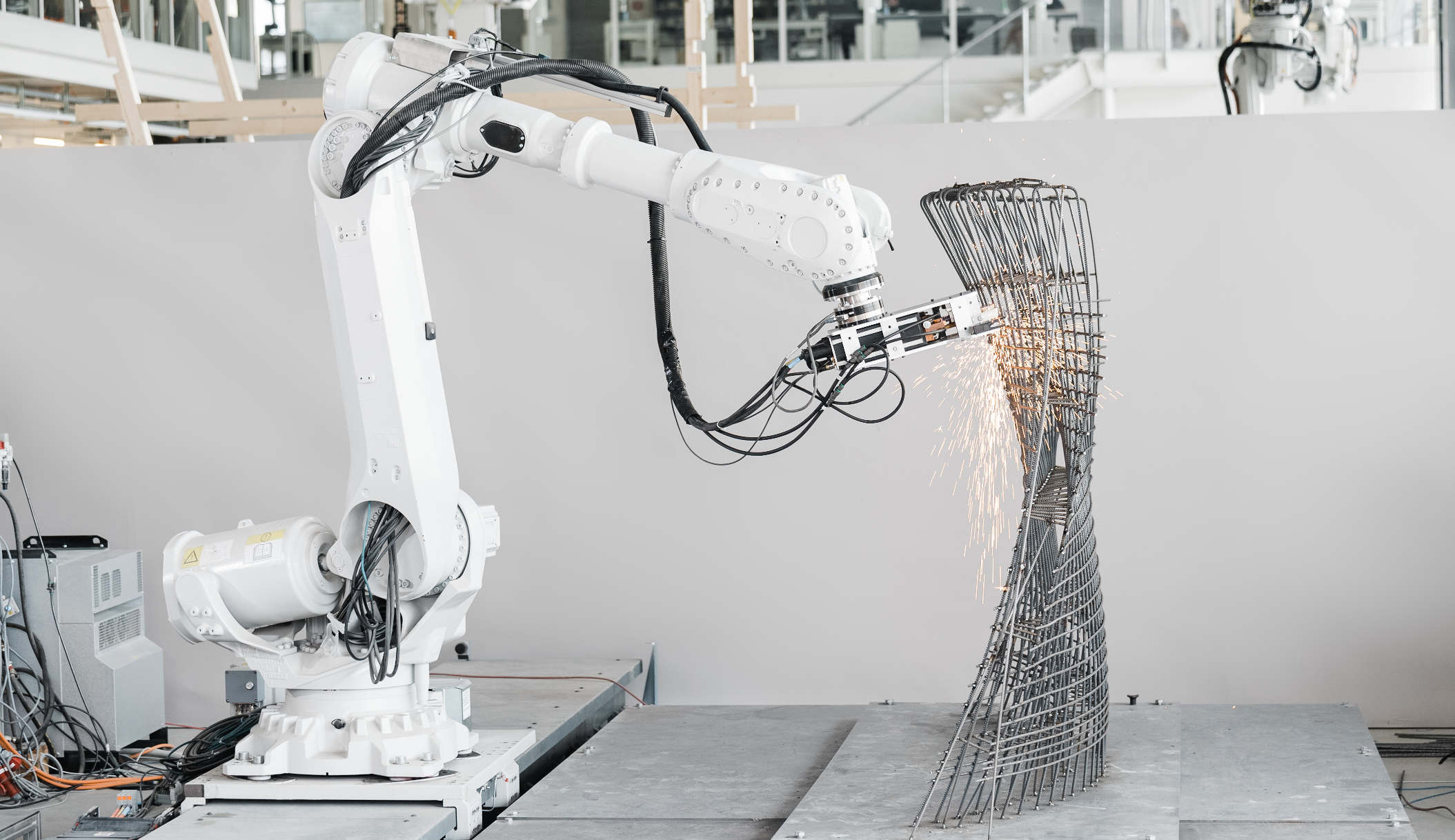
Previously, I was CTO at MESH, where we brought robotics and ML to the construction industry.
I did my PhD in Machine Learning and Robotics from 2018 to 2022 at the ETH Zürich, under Prof. Siegwart.
I'm interested in embodied AI - How can robotics help us better understand the ingredients of intelligence? My main research question during the PhD was how algorithms can create powerful, predictive models of the world from unlabeled data, and use them in decision making. I'm willing to bet that big breakthroughs will result from 1) deeper understanding of foundational models, 2) better world-models, and 3) deeper integration of high-level reasoning (for example large multi-modal models) into low level systems (Perception, SLAM, Controls).

Publications
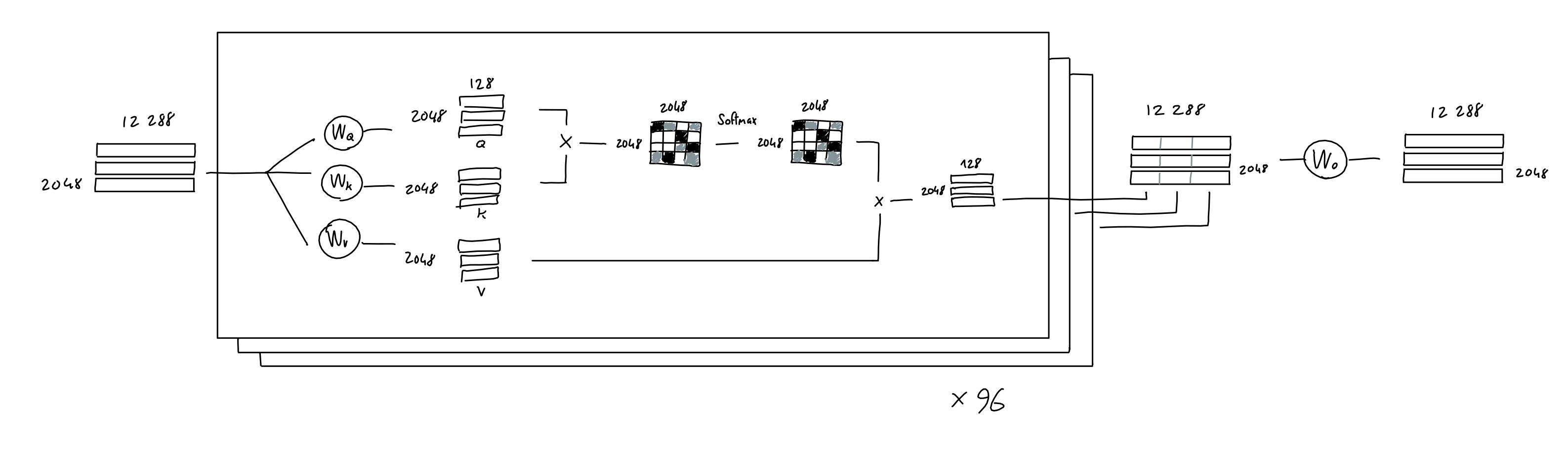
V-JEPA 2: Self-Supervised Video Models Enable Understanding, Prediction and Planning
Mido Assran, Adrien Bardes, David Fan, Quentin Garrido, Russell Howes, Mojtaba, Komeili, Matthew Muckley, Ammar Rizvi, Claire Roberts, Koustuv Sinha, Artem Zholus, Sergio Arnaud, Abha Gejji, Ada Martin, Francois Robert Hogan, Daniel Dugas, Piotr Bojanowski, Vasil Khalidov, Patrick Labatut, Francisco Massa, Marc Szafraniec, Kapil Krishnakumar, Yong Li, Xiaodong Ma, Sarath Chandar, Franziska Meier, Yann LeCun, Michael Rabbat, Nicolas Ballas
AI at META, 2025
Locate 3D: Real-World Object Localization via Self-Supervised Learning in 3D
Sergio Arnaud, Paul McVay, Ada Martin, Arjun Majumdar, Krishna Murthy Jatavallabhula, Phillip Thomas, Ruslan Partsey, Daniel Dugas, Abha Gejji, Alexander Sax, Vincent-Pierre Berges, Mikael Henaff, Ayush Jain, Ang Cao, Ishita Prasad, Mrinal Kalakrishnan, Michael Rabbat, Nicolas Ballas, Mido Assran, Oleksandr Maksymets, Aravind Rajeswaran, Franziska Meier
The International Conference on Machine Learning (ICML), 2025
PhD Thesis: Do Androids Dream of Interactive Navigation?
Daniel Dugas
ETH Zürich Research Collection
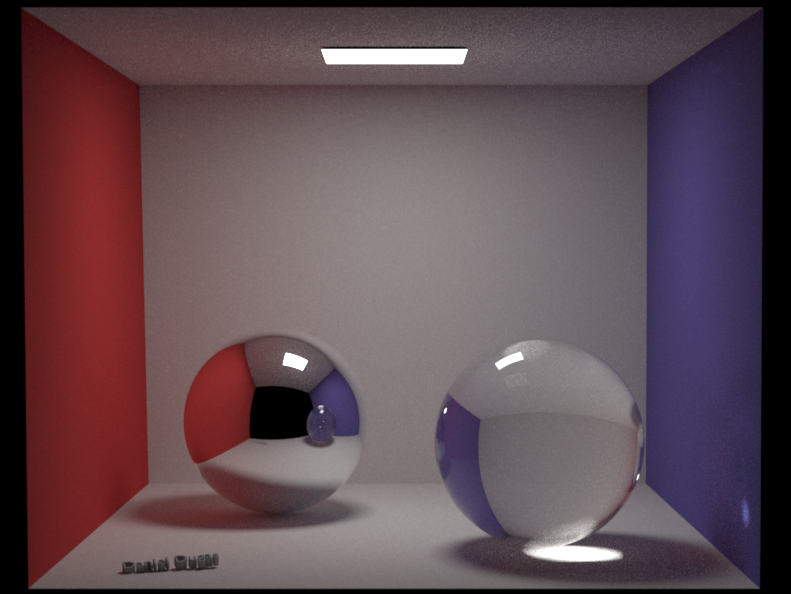
NavDreams: Towards Camera-Only RL Navigation Among Humans
Daniel Dugas, Olov Andersson, Roland Siegwart, and Jen Jen Chung
IEEE International Conference on Intelligent Robots and Systems (IROS), 2022
NavRep: Unsupervised Representations for Reinforcement Learning of Robot Navigation in Dynamic Human Environments
Daniel Dugas, Juan Nieto, Roland Siegwart, Jen Jen Chung
IEEE International Conference on Robotics and Automation (ICRA), 2021
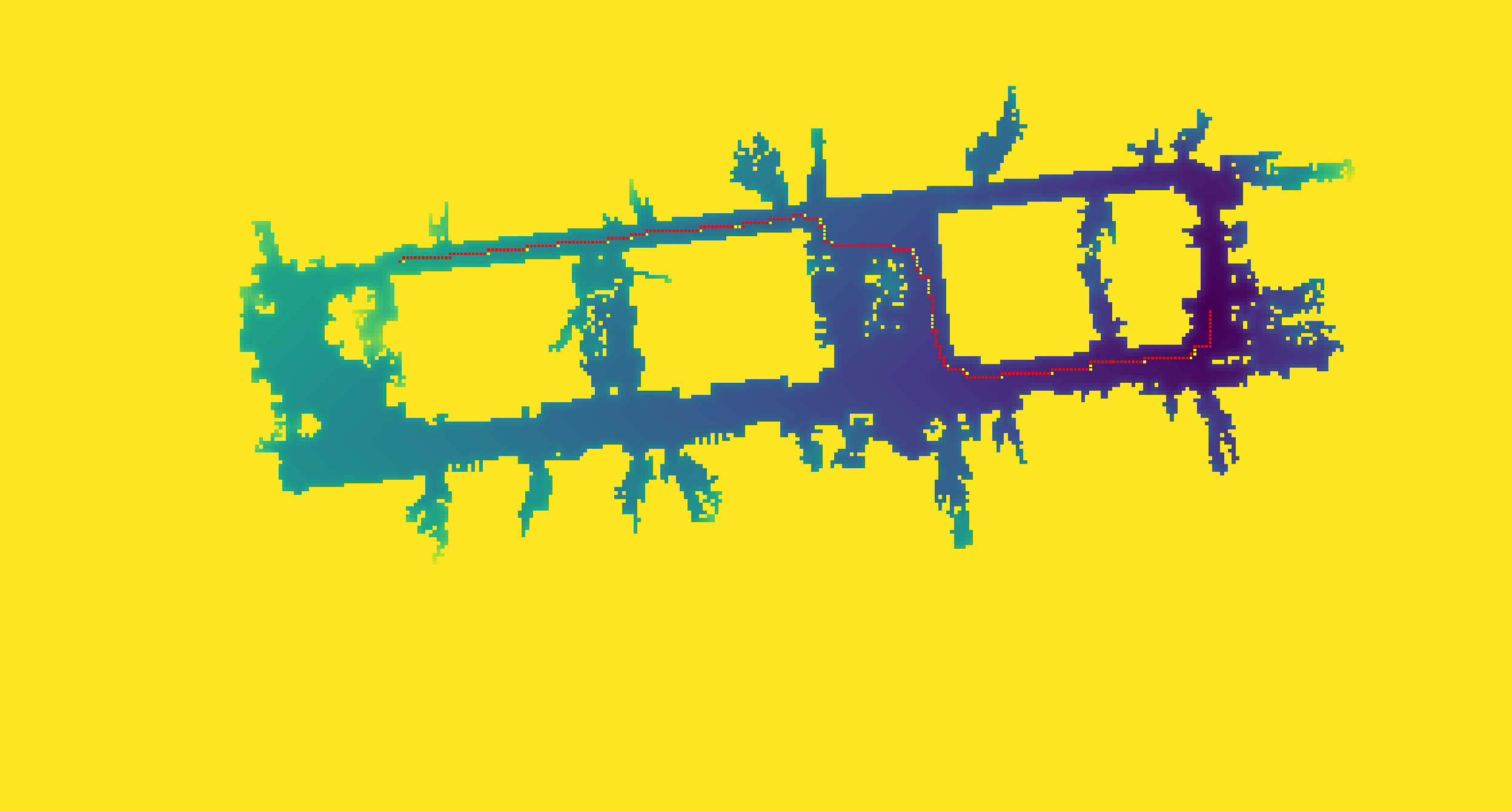
IAN: Multi-Behavior Navigation Planning for Robots in Real, Crowded Environments
Daniel Dugas, Juan Nieto, Roland Siegwart, Jen Jen Chung
IEEE International Conference on Intelligent Robots and Systems (IROS), 2020
![]()
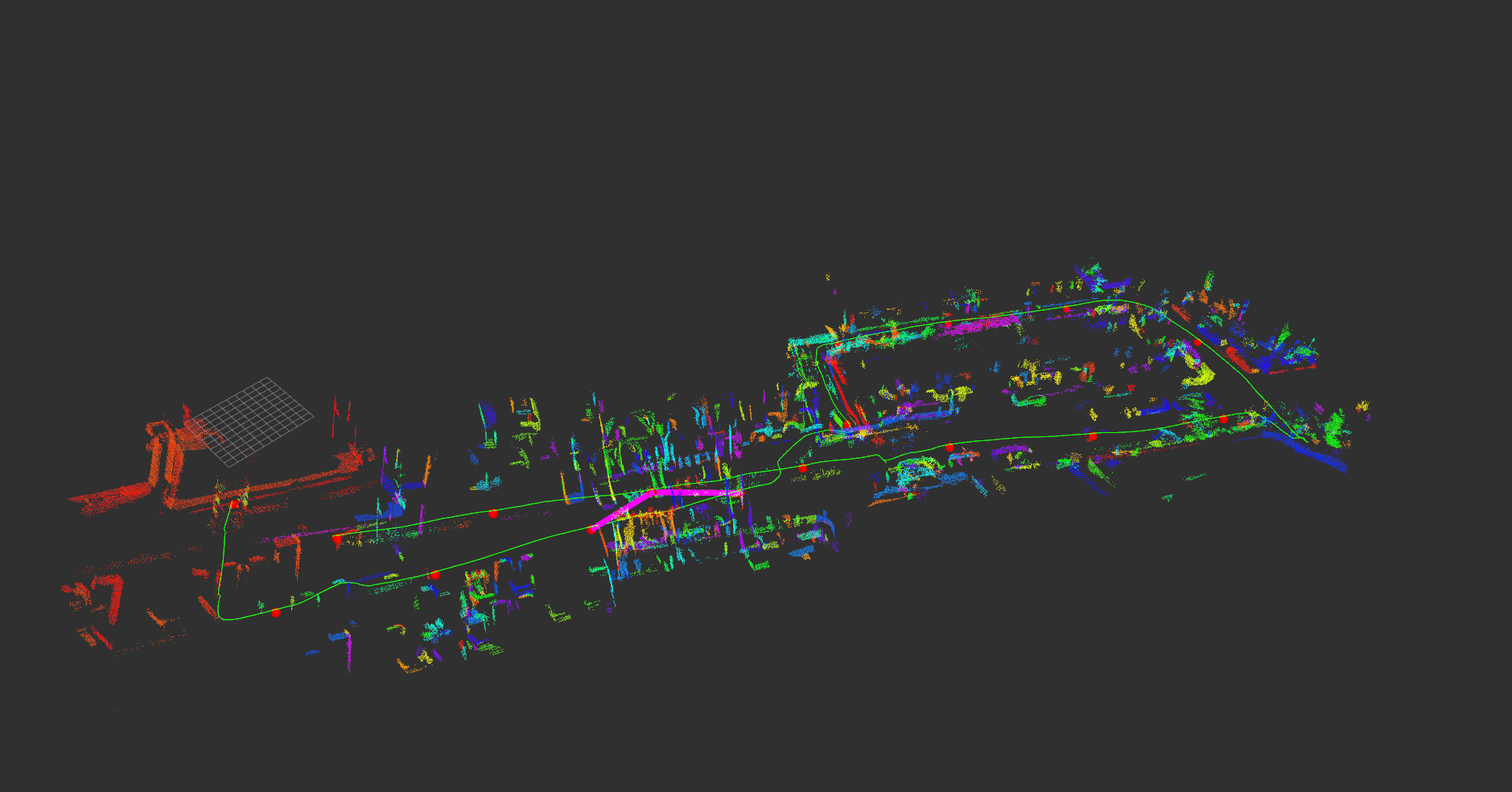
SegMap: Segment-based mapping and localization using data-driven descriptors
Renaud Dubé, Andrei Cramariuc, Daniel Dugas, Hannes Sommer, Marcin Dymczyk, Juan Nieto, Roland Siegwart, Cesar Cadena
The International Journal of Robotics Research (IJRR), 2019
More publications...